











Visori Vr, funzionamento Oculus Rift
Visori Vr, funzionamento Oculus Rift: La primissima versione di Oculus Rift, progettata da Palmer Luckey, completata da John Carmack, viene presentata all’E3 del 2012. Il prototipo è equipaggiato con un sensore di movimento (IMU), in grado di tracciare posizione e orientamento in relazione all’ambiente circostante, senza basette di tracciamento esterne.
Un display OLED da 5.6 pollici con una risoluzione di 1920 × 1080 pixel, con una latenza di circa 100 ms. La scelta della tecnologia OLED, rispetto alla meno costosa tecnologia LCD, è giustificata dalla velocità di risposta molto inferiore dell’ OLED.
Infatti permette l’utilizzo di una tecnica chiamata low persistence o strobing. tale tecnica riduce il motion blur dovuto alla persistenza dell’immagine sulla retina.

La visione dello schermo è resa possibile da una coppia di lenti, posizionate davanti agli occhi per fornire un angolo di visuale di circa 90 gradi in orizzontale e 110 gradi in verticale.
Con la campagna Kickstarter, vene rilasciato il Development Kit 1 (DK1), che aggiorna l’hardware con uno schermo da 7 pollici, riduzione della latenza, profondità di colore di 24 bit per pixel.
Il nuovo schermo inoltre produce un 3D il cui FOV non ha una sovrapposizione totale dell’immagine sinistra e destra, ma lascia un’area esterna extra ad entrambi gli occhi.
FOV è acronimo di Field of View, ovvero Campo visivo, rappresenta l’estensione dell’immagine osservabile in un dato momento e da un punto fisso. La risoluzione scende a 1280 × 800, portando ad una risoluzione effettiva di 640 × 800 pixel per occhio.
Per tracciare il movimento della testa il prototipo include un sensore detto 3 degrees of freedom (3DoF) a 125 Hz, con un firmware, ossia un programma presente nel dispositivo, una sorta di “sistema operativo integrato”, non personalizzabile ma stabile scritto dallo stesso Carmack, per portarlo ad una frequenza di aggiornamento di 250 Hz, per cercare di ridurre i problemi di latenza.
Visori Vr, funzionamento Oculus Rift : nel marzo 2014, alla Game Developers Conference (GDC) di San Francisco viene annunciata l’uscita del DK2. In questa versione il tracker di movimento si aggiorna con nuovi device: giroscopio, accelerometro e magnetometro, per dare la posizione assoluta relativa alla Terra della testa; infatti, viene aggiunta una camera esterna per tracciare in infrarosso dei punti piazzati sull’esterno del visore.
Il chip è aggiornato per avere una frequenza di aggiornamento di 1 MHz. Il display torna ad essere 1920 × 1080, dando una risoluzione per occhio di 960 × 1080 pixel.
Con il nuovo display, Il vantaggio è che l’effetto ‘screen door’ in cui gli spazi tra i pixel creavano un reticolato nero sull’immagine risultano meno pronunciati. Un esame attento rivela un tratteggio diagonale, e concentrarsi sugli oggetti lontani è ancora problematico, ma durante il gioco l’effetto è meno evidente.
L’altro grosso vantaggio di questo pannello OLED è la bassa persistenza, fondamentale per ridurre la nausea che ha affetto molti utenti del DK1. Non c’è più il caos derivante da movimenti rapidi della testa, sostituito da un’immagine più nitida e reattiva che permette agli occhi di seguire gli oggetti come farebbero nella vita reale.
È ancora presente un leggero ghosting (effetto fantasma) di oggetti molto chiari o bianchi su sfondi scuri. Il sistema di tracciamento della testa di Oculus Rift consente al medium di avere una visuale nel mondo virtuale, comparabile al 90% a quella nel mondo reale.
Il tracker analizza costantemente i movimenti della testa, che può essere in questo modo usata al posto di una levetta analogica per controllare la vista all’interno del gioco.
Questo sistema permette un’interazione naturale del medium con il mondo, migliorando notevolmente la sensazione di immersione. I sensori del dispositivo supportano una frequenza di aggiornamento di 1 MHz, che comporta ritardo temporale tra il movimento della testa e la ricezione dei dati da parte del motore grafico di circa 2 millisecondi.
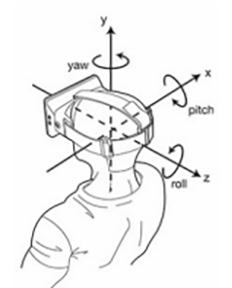
I sensori inclusi sono un giroscopio, un accelerometro e un magnetometro, che consentono di creare una rappresentazione della visuale come insieme di rotazioni destrorse. Le informazioni ottenute da questi tre componenti elettronici vengono combinate in un processo che viene definito sensor fusion.
L’informazione viene mantenuta nella forma di un quaternione unitario, ma può essere convertita dal Software Development Kit (SDK) nella notazione “yaw-pitch-roll” All’interno del SDK si può far riferimento alla classe Sensor Fusion per avere informazioni sull’orientamento del dispositivo, sotto forma di quaternioni, matrici rotazionali o angoli di Eulero.
Il componente principale, il giroscopio, fornisce informazioni sul tasso di rotazione lungo gli assi x, y e z misurato in radianti al secondo. In ogni istante di campionamento la misura della rotazione può essere espressa come
ω = (ωx, ωy, ωz)
Analizzando i valori della velocità angolare nel tempo, il software è in grado di tracciare la posizione dell’Oculus Rift rispetto alla sua posizione iniziale.
Il giroscopio però non è in grado di determinare la posizione iniziale ed è soggetto ad errori di derivazione che possono accumularsi nel tempo portando a posizioni scorrette del giocatore virtuale rispetto a quello reale.
L’errore di derivazione può essere diviso in due componenti:
- tilt error: un cambiamento nell’orientamento delle componenti pitch o roll. Un errore nel tilt comporta una certa confusione rispetto alla posizione del livello del terreno nel gioco.
- yaw error: un cambiamento nell’orientamento della sola componente y. Un errore di derivazione dello yaw comporta un’incertezza rispetto a dove è rivolto lo sguardo del medium nel gioco
Questa distinzione è relativa ad una coordinata globale del sistema y che è sempre rivolta verso l’alto. I due errori in questione vengono ridotti usando la misura dell’accelerazione rispetto al vettore di gravità terrestre g.
L’accelerometro misura contemporaneamente l’accelerazione lineare della testa e la gravità, sulla media calcolata in un lungo periodo può stimare in modo affidabile la direzione della gravità.
Quando viene rilevata una differenza tra l’asse y misurato e l’asse y calcolato viene effettuata una correzione. L’accelerometro non può invece percepire l’errore sullo yaw, perché il suo asse di rotazione è allineato perfettamente alla gravità.

Il magnetometro fornisce la correzione dell’errore di derivazione dello yaw usando il campo magnetico della Terra, che fornisce un vettore fisso in ogni luogo. Il campo magnetico viene però leggermente alterato dall’interferenza dei materiali vicini al sensore, sia dentro l’Oculus Rift, sia nell’ambiente circostante.
Visori Vr, funzionamento Oculus Rift: per questo motivo il magnetometro andrebbe calibrato tramite le utility di configurazione su ogni Oculus Rift ogni volta che si cambia luogo di utilizzo.
Visori Vr, matematica e fisica applicata: analizzeremo nei prossimi post come le leggi matematiche e fisiche vengono applicate per la realizzazione di un ambiente virtuale e di come ogni interazione uomo macchina è regolata e le correzioni sono apportate utilizzando le conoscenze della matematica e fisica attuali.
Views: 206